

随着移动机器人技术的发展,大多数的场景下机器人已经能够取代人工进行工作与探测。但在一些复杂的场景下,传统的单一运动模式机器人往往难以有效工作。因此现阶段机器人朝着更加灵活,多功能的方向发展。传统移动机器人的障碍穿越能力有限,在面对高于自身高度的障碍物例如楼梯、碎石、沟渠等非结构路面时甚至难以移动。跳跃机器人相对于传统的移动机器人拥有更强的越障能力,其可以轻易翻越数倍甚至数十倍于自身尺寸的障碍。近日,2024老澳门原料网江苏省特种机器人重点实验室王延杰教授团队在国际期刊Advanced Intelligent Systems上发表以“Tumro: A Tunable Multimodal Wheeled Jumping Robot Based on the Bionic Mechanism of Jumping Beetles”为题的研究性论文。该工作从以跳甲的蓄能跳跃机理出发并结合功乘原理,提出了一种小电机驱动的具有多种运动模式的小型跳跃机器人(图1),该机器人具有快速的轮式运动与优良的跳跃运动,有望在未来的复杂地形探测以及地外低重力行星探测发挥作用。目前该工作已被Advanced Science News报道(https://www.advancedsciencenews.com/meet-tumro-a-jumping-robot-inspired-by-beetles/),2024老澳门原料网王延杰教授为该论文的独立通讯作者,硕士研究生潘一帆为论文第一作者。
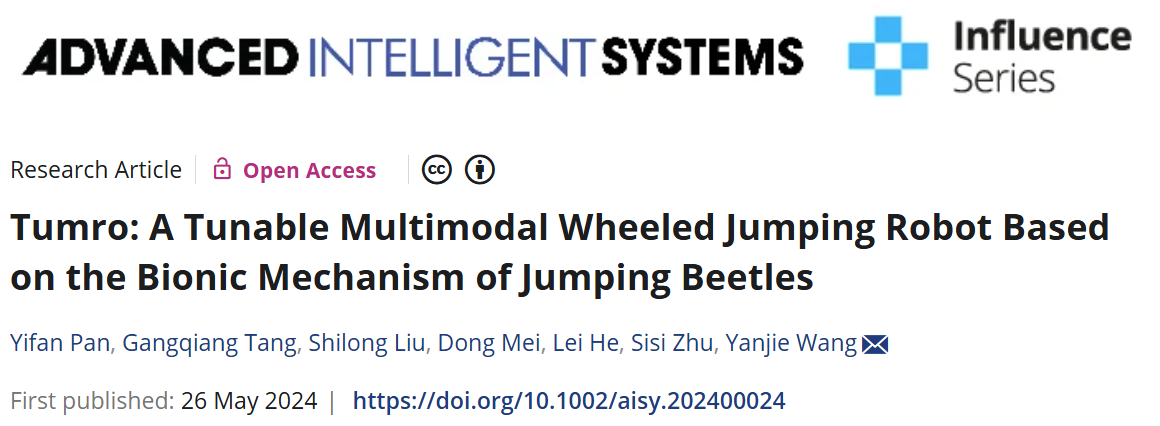
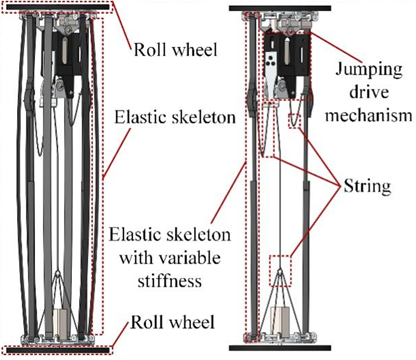
图1 多模式跳跃机器人整体结构
面对复杂的现实场景,单一的运动模式往往难以有效应对。跳跃机器人相对于传统的移动机器人拥有更强的越障能力,其可以轻易翻越数倍甚至数十倍于自身尺寸的障碍。在自然界中存在着许多具有优秀跳跃能力,高敏捷性的生物,尤其是昆虫类,它们的跳跃高度通常为身长的数倍至数百倍不等,例如蝗虫,跳蚤,吹泡虫等。通过对跳甲跳跃过程的拆解分析,其跳跃过程的等效模型如图1所示,该等效模型解释了其能够实现高速跳跃的普遍机理,生物肌肉的拉伸行程通常较为有限,但通过一定的机械增益可以将肌肉的拉伸行程放大。在等效机械模型中,甲虫的弹性外壳以及肌腱蛋白等被等效为一储能弹簧。在等效模型中对甲虫的跳跃过程进行拆解,同样的分为四个阶段,这四个阶段分别为:蓄能阶段、释能阶段、加速阶段和起跳阶段。
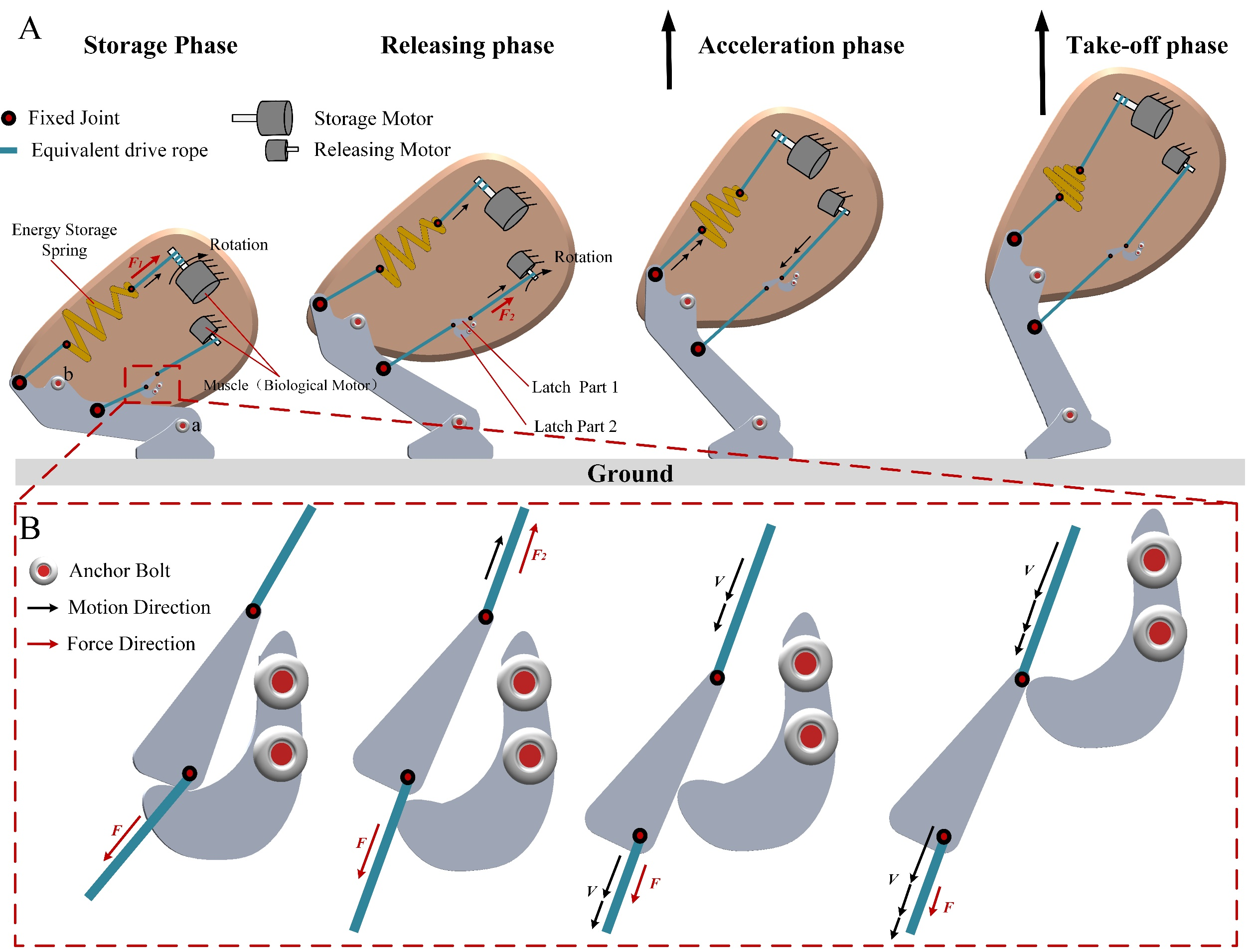
图2 甲虫跳跃过程与跳跃机理分析
具有多种运动模式的跳跃机器人,能够适应更多场景,具有灵活性与高机动性的机器人对未来的复杂场景探测至关重要。然而目前的多模式跳跃机器人在机动性与灵活性上仍有进一步进步的空间,跳跃后的姿态调整以及额外的蓄能跳跃机构也是限制现有多模式跳跃机器人机动性能的关键因素。因此,受甲虫跳跃蓄能机制启发,将蓄能机构融入到机器人本体结构中以进一步的精简结构,课题组提出了一种多模式跳跃机器人,该机器人在蓄能时即可完成姿态切换,且在跳跃落地后无需姿态调整可立刻进入到轮式爬行运动模式。机器人的最大跳跃高度达到3.0m,跳跃的峰值功率能够达到233.97W,能够通过最小70mm高的狭小空间,其最小转向半径为160mm(图3)。

图3 机器人的轮式运动与姿态切换
如图4所示,我们对机器人的跳跃性能进行了测试,在近乎垂直的起跳角度下,机器人能够实现垂直高度3m的跳跃,在倾斜的情况下,机器人能够实现1.4m的水平距离与2.1m的垂直高度的跳跃。
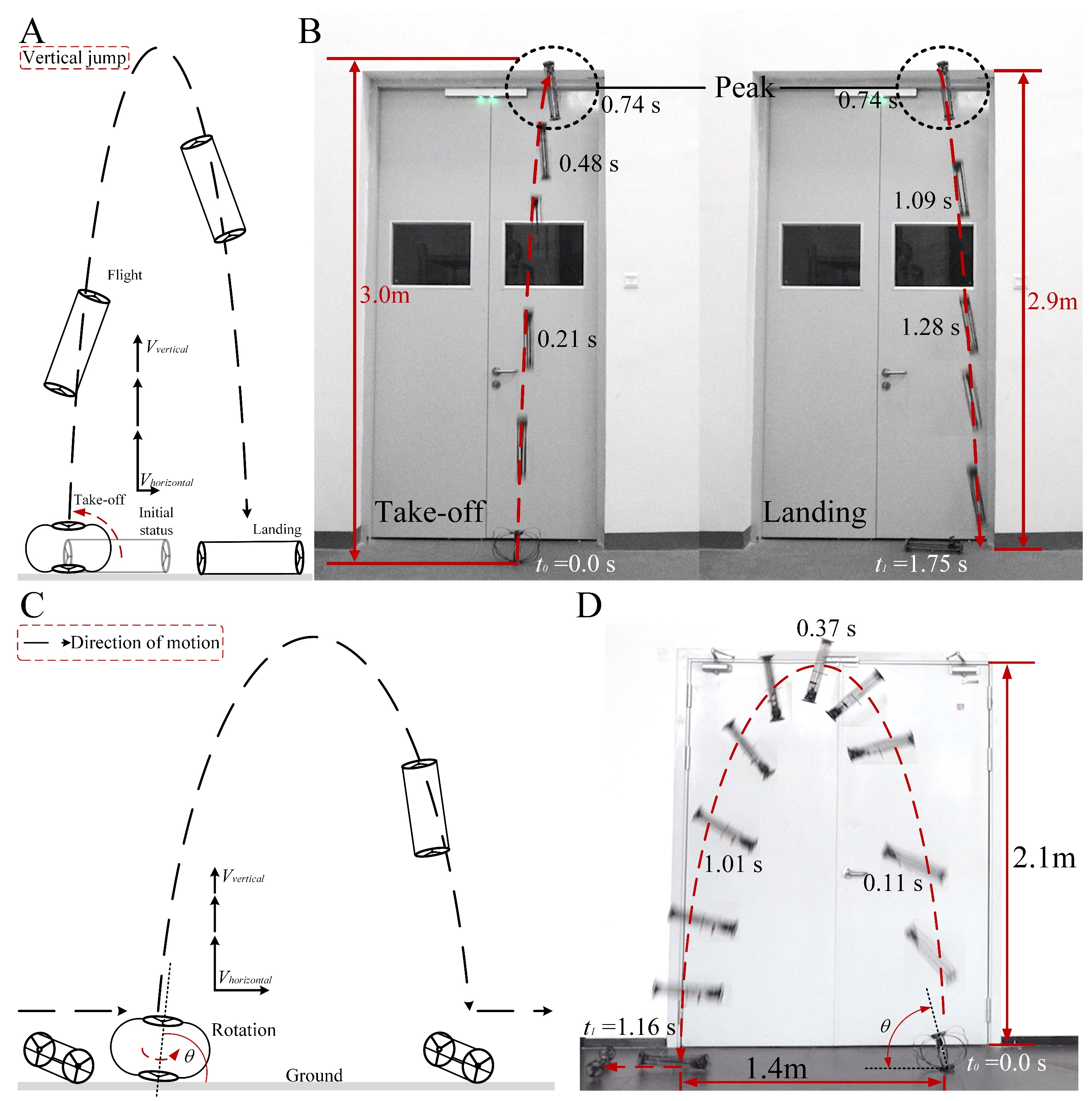
图4 多模式跳跃机器人运动性能测试
机器人在轮式爬行状态下,其前行以及原地转向运动状态的平均功耗为0.43W,在单边旋转运动状态下的平均功耗为0.18W(图5A-C)。对比显示,本工作所提出的多模式跳跃机器人在质量更大的前提下,仍能在跳跃高度上具有一定的领先。同时,机器人的机构设计与位姿改变策略使得机器人能够在较小的高度内实现爬行通过,因此在低矮空间的通过性上仍较现有的多模式机器人有一定的优势(图5E-G)。
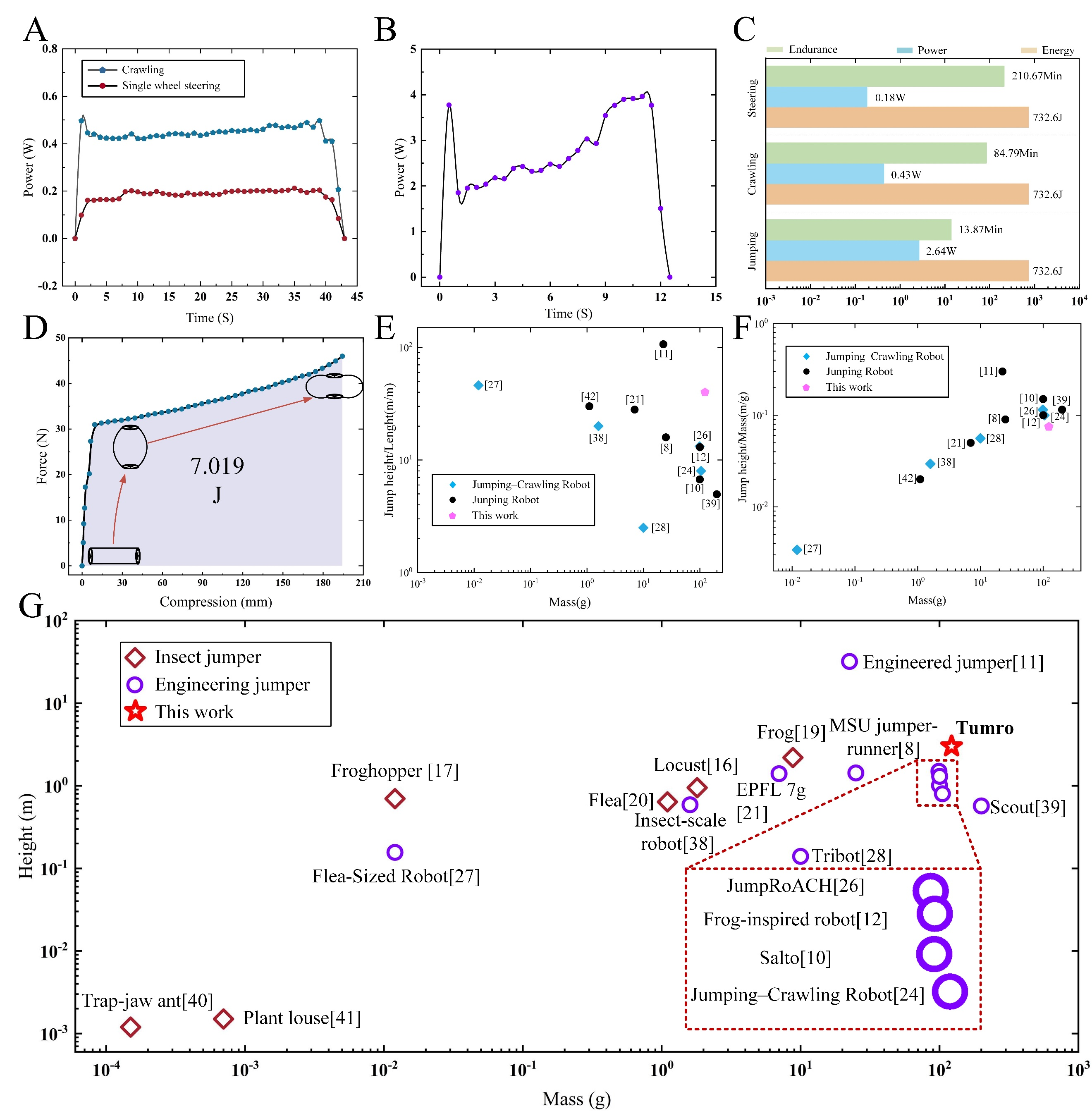
图5 多模式跳跃机器人性能测试与运动效果对比
Advanced Science News是Wiley学术出版集团主办的科技新闻网站,报道在其旗下期刊上发表的最新重要研究成果。相关工作得到了国家重点研发计划(2022YFB4703401)、江苏省研究生科研与实践创新项目(422003180)、中央高校业务费(B230205024)的资助。
论文在线网址:https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202400024(潘一帆)


